Lunar Cave Explorer (differential-driven)
The Daedalus mission, funded by the European Space Agency, aims at the exploration and characterisation of lunar cave. Alongside the spherically designed robot, my undergraduate thesis investigates the potential of a differential-driven robot for extreme environments. From its initial concept to its final build, the performance of this robot has been tested in an artificial lunar lab, simulating lunar gravity conditions

Mission
Lunar orbiters have mapped multiple deep pits on the surface of the Moon, believed to be ‘skylights’ into lava caves. These are of high scientific interest, offering access to pristine lunar material – perhaps even water ice deposits. Such caves might also become habitats for lunar settlers, offering natural shielding against radiation, micrometeorites and surface temperature extremes.
For this project, an alternative robot to the originally proposed spherical design has been developed and studied. For the sake of stability and payload space, the original spherical design was extended into a cylindrical shape. This guarantees an easier maneuverability and more space for the scientific equipment. This robot employs a differential drivetrain for better mobility.

Design objectives
In space, where human limitations are most palpable, the robot needs to be able to carry out the mission reliably and autonomously. Therefore, the design needs to adhere to the following objectives:
• high degree of mobility (e.g. precision, zero or small turn radius, suitable for lunar environ- ment)
• efficient and economic space management (e.g. reducing the needed space of the locomotion to a minimum)
• continuous reliability and functionality (e.g. vibration of launch, long-term operations)
Body design
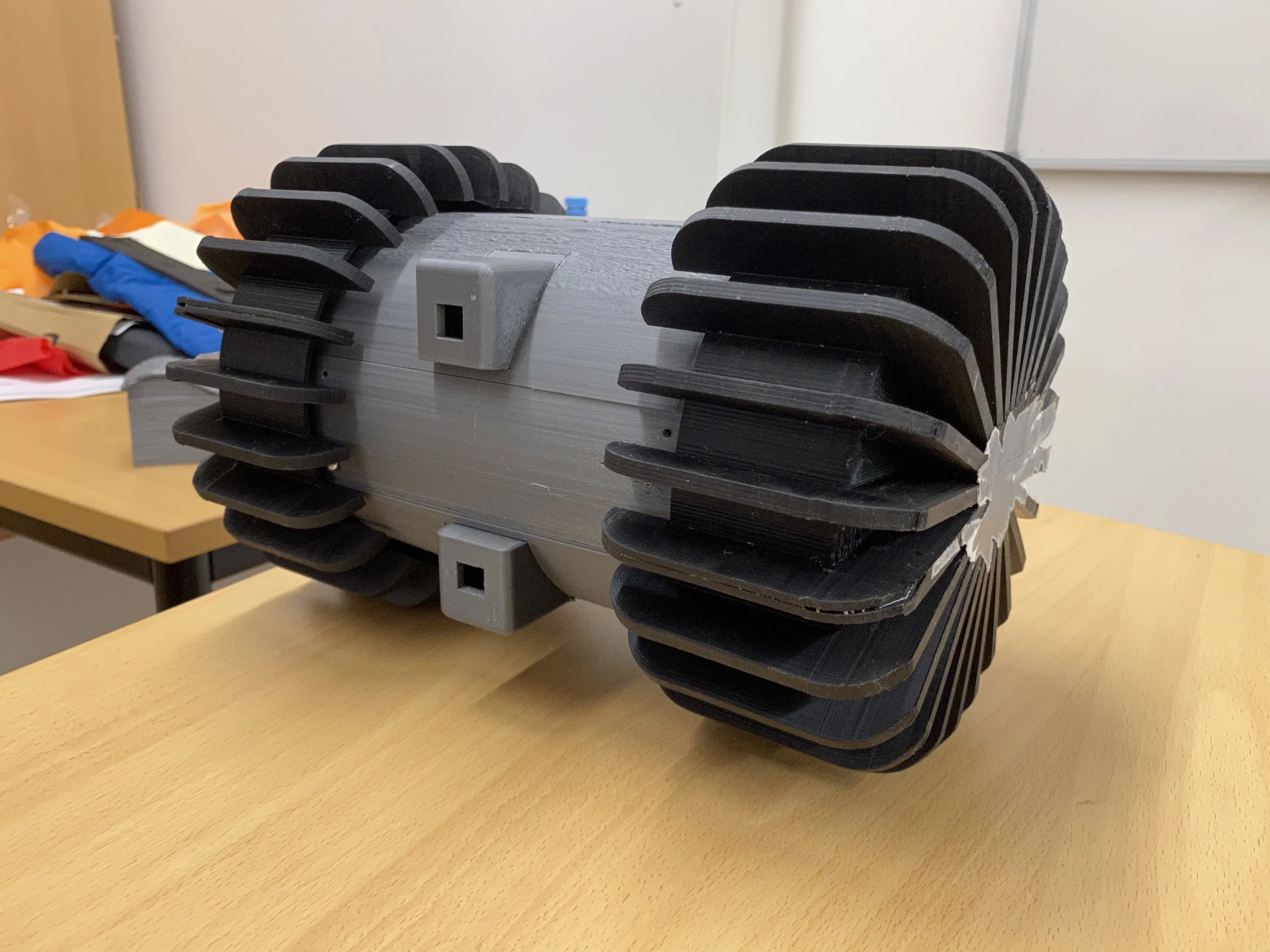
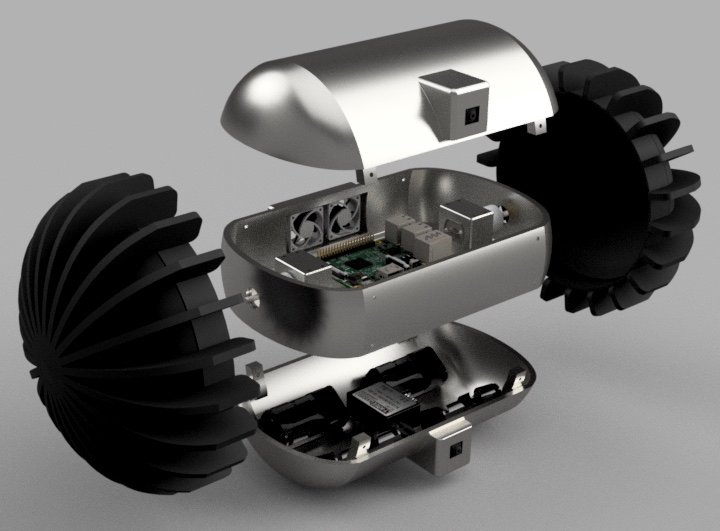
In line with the design goals, we propose a differential-driven robot, optimized for high mobility and traction. The body of the robot is designed with minimal apertures, aiming to protect its internal components from the lunar environment, while still providing enough space for equipment.
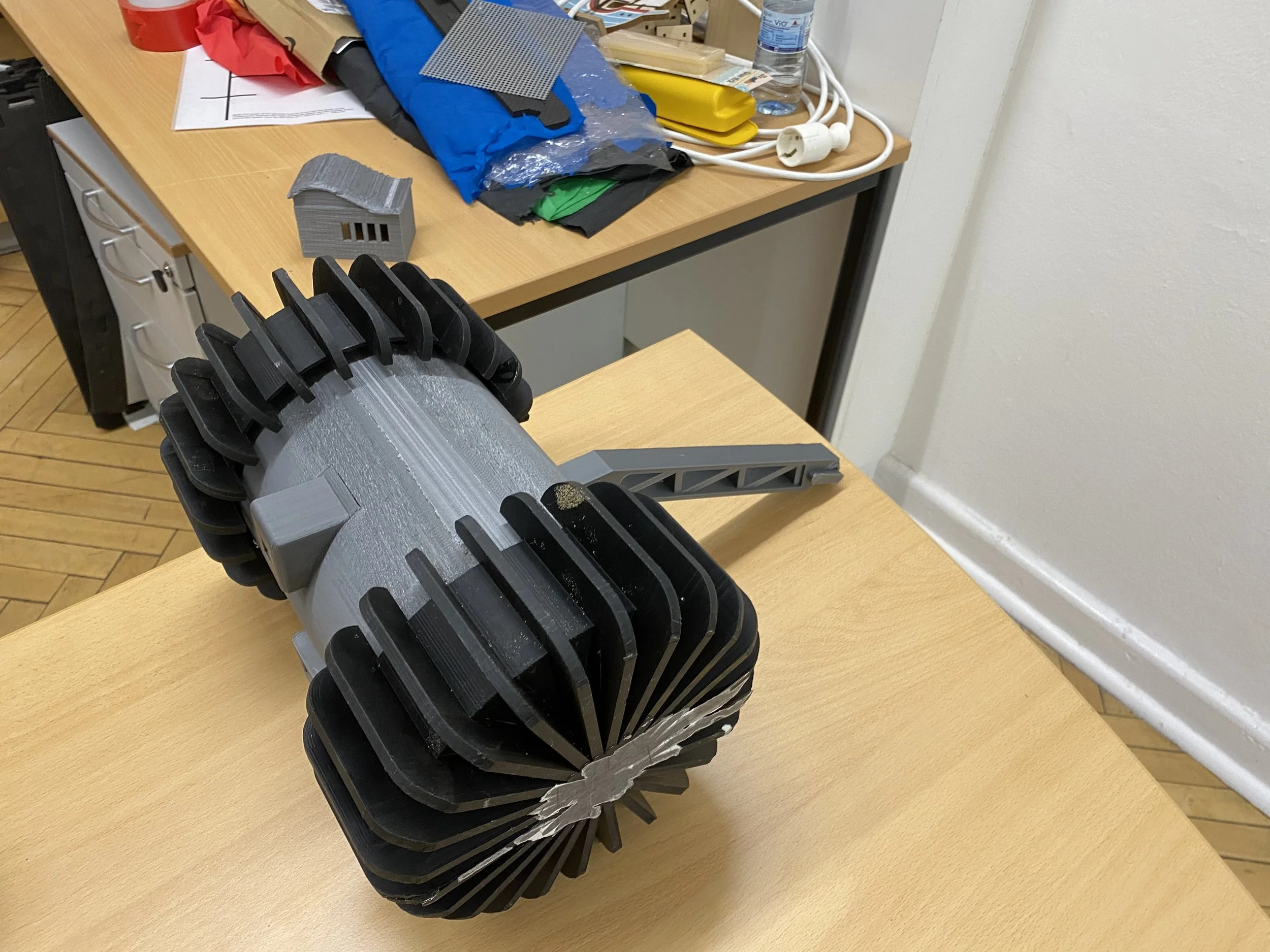
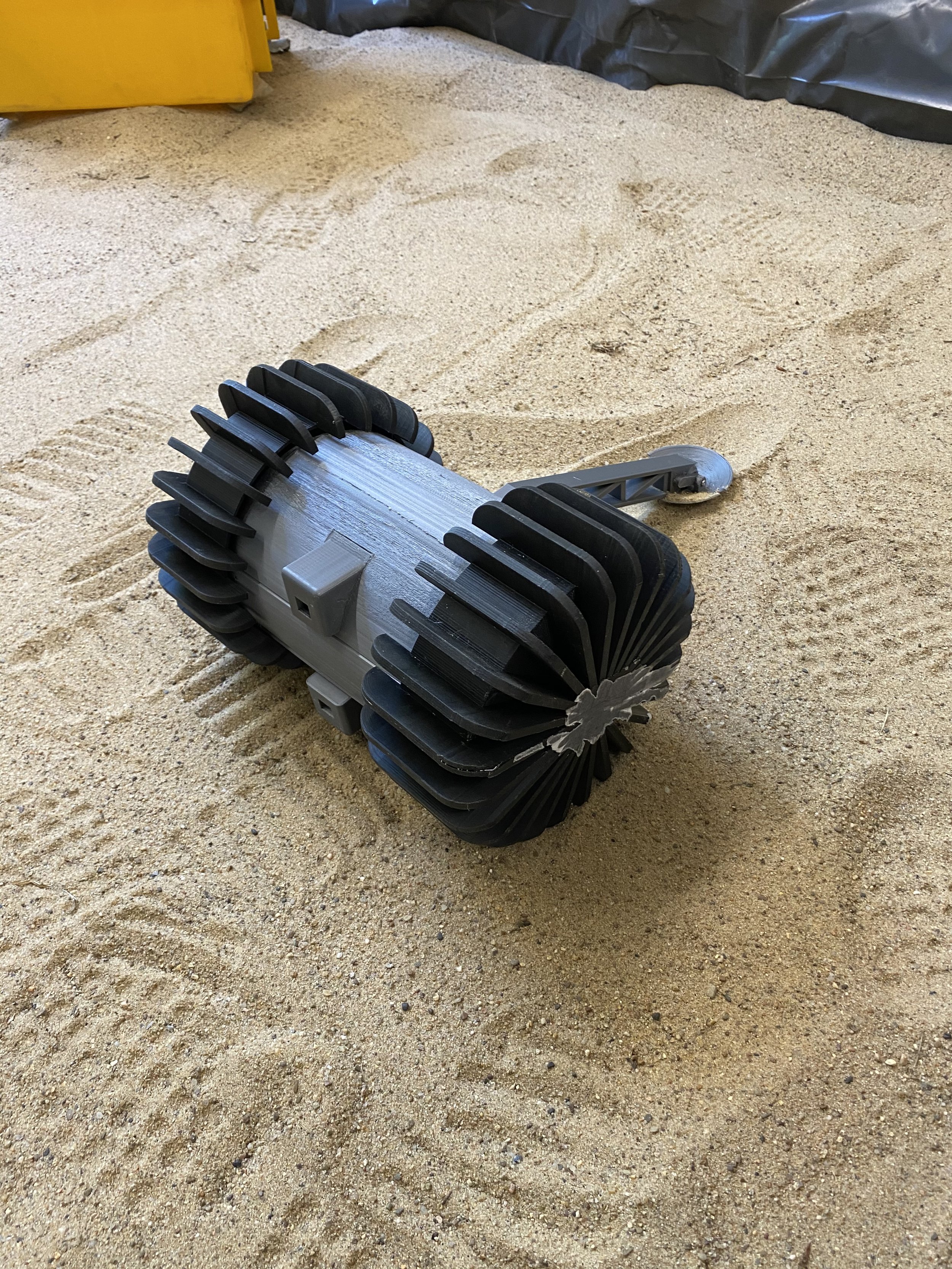
The robot is divided into 2 sections: the two semi-hemispheres that act as wheels and an internal corpus which houses the scientific equipment and is connected to the semi-hemispheres with two motors.
The internal corpus is divided into three parts: perception sensors at the top, control and propulsion systems in the middle, and the power supply at the bottom. These modular sections are designed for interchangeability, offering flexibility that allows for the testing of various equipment without the need for significant redesigns.
Note: The fan is only for testing purposes. It has since been replaced with a stability system

Wheel design
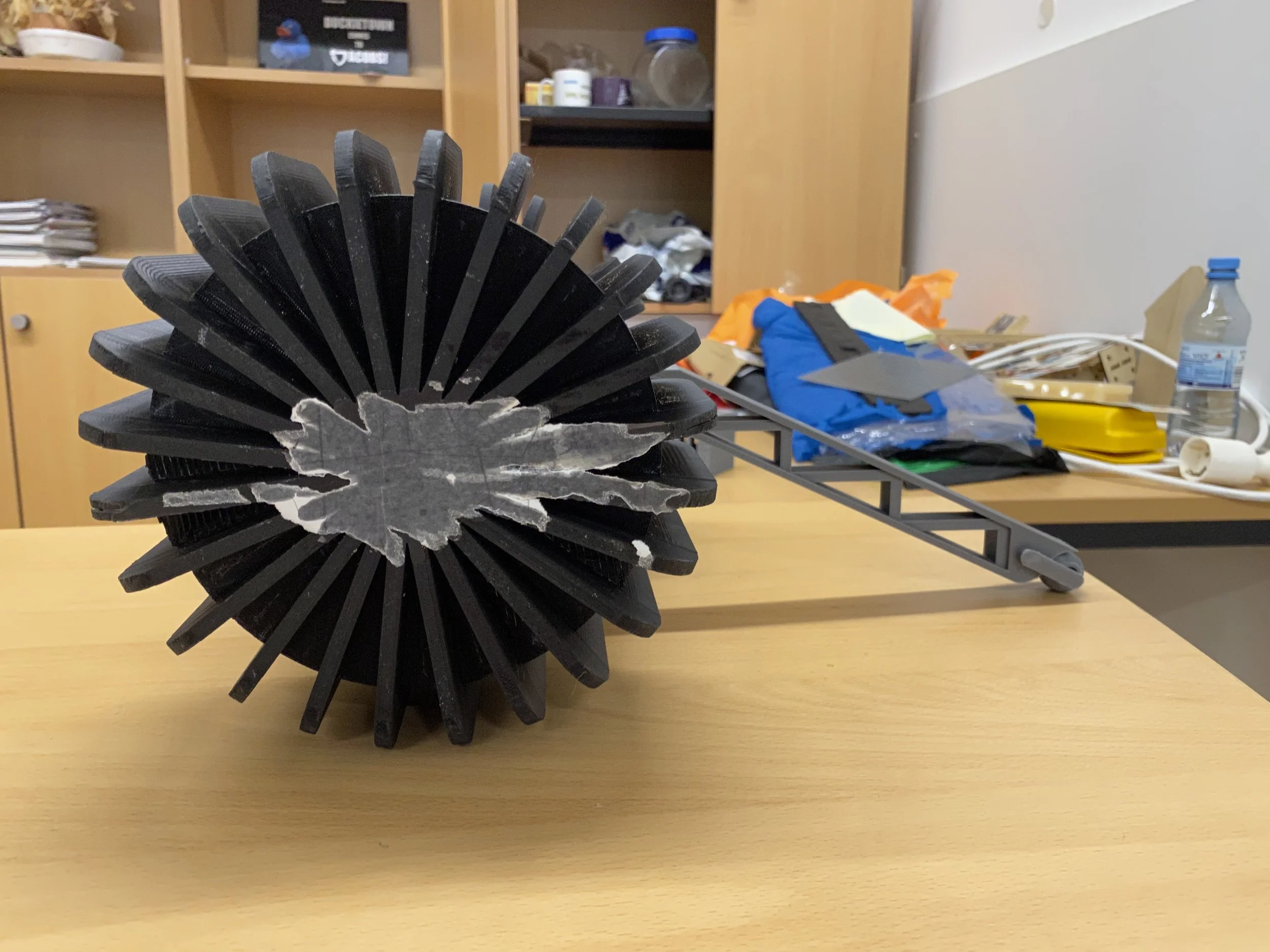
The wheels feature 24 grousers for enhanced traction on surfaces like gravel or lunar regolith. With a 0.02 m depth, grousers elevate the robot, aiding in navigating soil irregularities and obstacles. The wheel's center has a custom-fit mounting for the motor shaft to prevent slipping. Two wheel types were tested for performance and power usage in lunar-like conditions.
The robot moves by controlling each of the wheels individually, which enables it to turn into any direction with a zero-turn radius.

Testing area
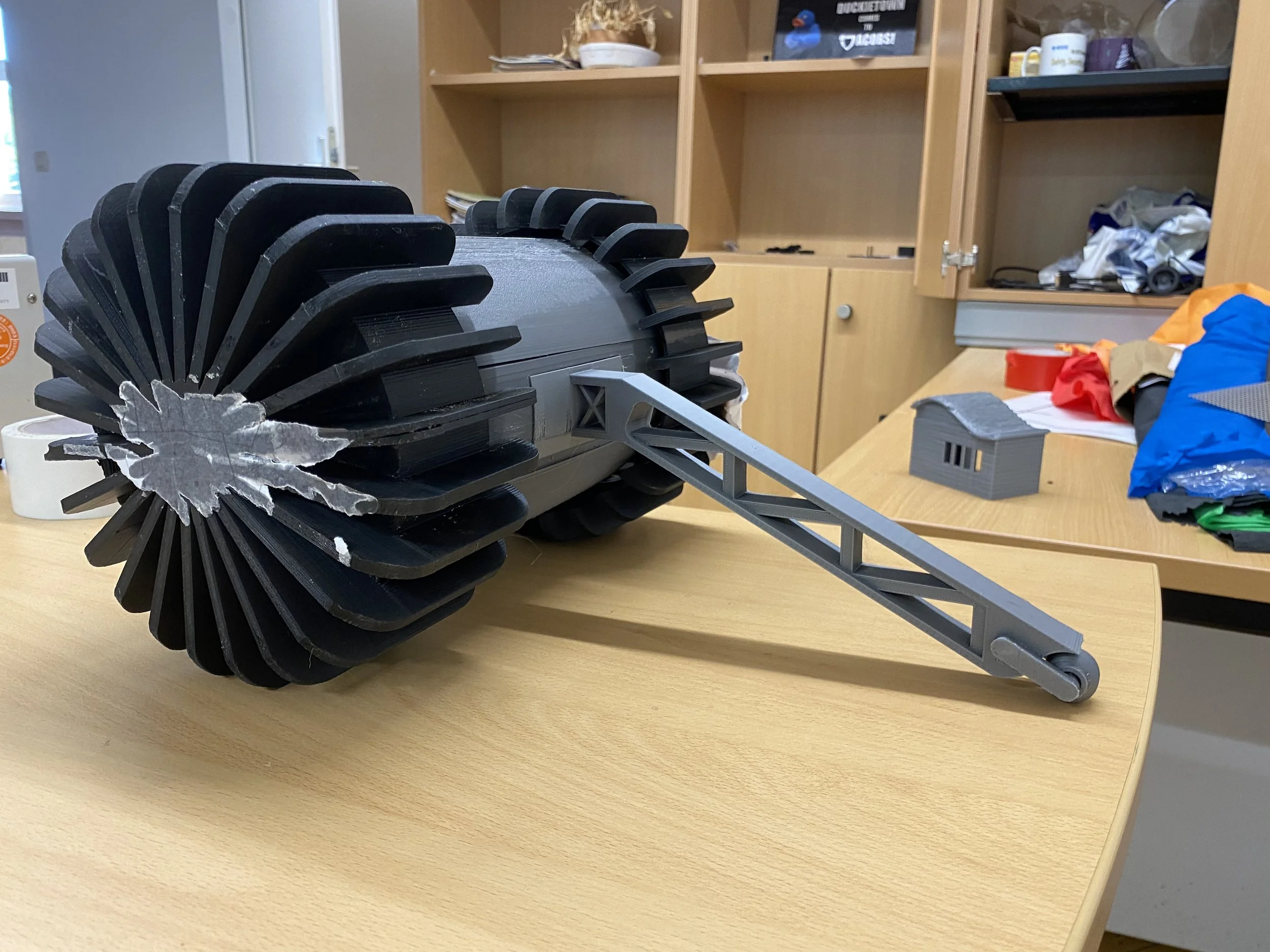
A 2x2m test area filled with soil was built to evaluate the robot's performance, half flat and half with an adjustable slope. To simulate lunar gravity, the robot is tethered to a counterweight system, reducing its weight to 1/6th. A rail system synchronised with the robot's speed controls the pulley, moving along while the robot operates in the test bed.
Results
The robot underwent testing by traveling a distance of 1.5 meters within the test area under lunar gravity. During these tests, its mobility, traversability, and energy efficiency were evaluated. The robot fulfilled the mission's requirements in these aspects.
The videos below show the robot operating on different terrains.
Gallery